反向運動學
使用 forward kinematics 工具主要涉及到的是正確地建立關(guān)節(jié)。在創(chuàng)建關(guān)節(jié)并將關(guān)節(jié)編為一組,且給關(guān)節(jié)加了合適的限制之后,就要轉(zhuǎn)換關(guān)節(jié)并給它們作關(guān)鍵幀。首先從頂部層級開始,然后向下處理底層關(guān)節(jié)直到獲得所要的姿態(tài)。
對于定向運動來說 ( 如一個人將腳放到地面或伸手開門 ) ,使用正向運動學來實現(xiàn)非常困難和麻煩,一般需用反向運動學 (ik) 來制作動畫。
反向運動學包括 ik 手柄和 ik 解算器。一個 ik 手柄貫穿受影響的關(guān)節(jié),這些受影響的關(guān)節(jié)就叫 ik 鏈,并且手柄線貫穿關(guān)節(jié)。手柄矢量指的是從起始關(guān)節(jié)開始指向末端關(guān)節(jié)的矢量,末端關(guān)節(jié)是 ik 手柄的末端受動器所在位置,如圖 13-17 所示。
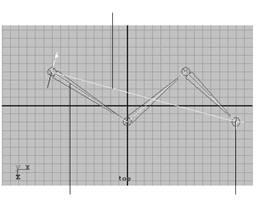
圖 13-17 ik 手柄
ik 解算器可以查看 ik 鏈末端受動器的位置并作一些必要的計算,以使關(guān)節(jié)能正確旋轉(zhuǎn)。旋轉(zhuǎn)方式是從起始關(guān)節(jié)開始到 ik 鏈的末端關(guān)節(jié)為止,這種方式意味著末端關(guān)節(jié)在末端受動器所在位置。當末端受動器移動時, ik 解算器就將末端受動器的平移值改為關(guān)節(jié)的旋轉(zhuǎn)值,關(guān)節(jié)也會相應(yīng)地改變。通常, ik 鏈只使用 3 個關(guān)節(jié),但也可以處理更多的關(guān)節(jié)。
maya 的界面有 3 種 ik 解算器: ikrp(rotate plane) 解算器, iksc(single chains) 解算器和 ik spline 解算器,每種 ik 解算器都有各自的 ik 手柄類型。
使用 ikrp 手柄
ikrp 解算器是 ik 手柄工具的默認設(shè)置,其具體操作步驟如下:
(1) 在側(cè)視圖中,畫一條簡單的關(guān)節(jié)鏈,如圖 13-18 所示。
(2) 執(zhí)行 skeleton → ik handle tool □命令,并將工具重置為默認設(shè)置。
(3) 單擊第 1 個關(guān)節(jié),然后單擊最后一個關(guān)節(jié),一個 ik 手柄已創(chuàng)建起來。頂部的圓復雜,如圖 13-19 所示。當?shù)玫狡浣M件的內(nèi)容時,設(shè)置起來就非常簡單。
ikrp 解算器僅計算末端受動器的位置值,而忽略了末端受動器的旋轉(zhuǎn)值。通過 ikrp 解算器旋轉(zhuǎn)的關(guān)節(jié),其旋轉(zhuǎn)方式是關(guān)節(jié)的 y 軸是平的、 x 軸指向骨頭中心、 z 軸垂直于彎曲方向。這是建立關(guān)節(jié)的默認局部方向坐標,如果沒有看到旋轉(zhuǎn)圓面,則可以執(zhí)行末端受動器并按 f 鍵顯示 show manipulator 工具。
沿著關(guān)節(jié)彎曲方向的平面由平面指示器顯示,平面作為關(guān)節(jié)鏈平面。用旋轉(zhuǎn) ik 鏈的扭曲圓平面可以繞手柄矢量旋轉(zhuǎn)該平面。相對于由手柄矢量和極矢量創(chuàng)建的參考面可以測出 twist 度,該參考面可以被移動且可以作關(guān)鍵幀。
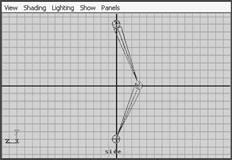
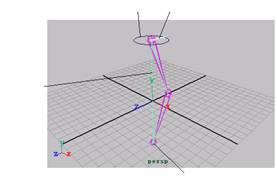
圖 13-18 建立骨骼 圖 13-19 ik 手柄
注意:
有時,手臂彎曲的方式會引起 ik 鏈與默認參考平面設(shè)置相互轉(zhuǎn)換,為了避免這種轉(zhuǎn)換,可以調(diào)整極矢量或作極矢量動畫。
使用 ikrp 手柄的好處在于能比較精確地控制 ik 鏈的旋轉(zhuǎn),缺點在于必須處理較多的組件。
使用 iksc 手柄
ik sc 手柄比 ik rp 手柄要簡單些,下面 介紹如何使用 ik sc 手柄。具體操作步驟如下:
(1) 首先進入側(cè)視圖并另畫一條簡單的關(guān)節(jié)鏈。
(2) 執(zhí)行 skeleton → ik handle tool ![]() 命令,如圖 13-20 所示進行沒置,然后關(guān)閉該對話框。
命令,如圖 13-20 所示進行沒置,然后關(guān)閉該對話框。

圖 13-20 設(shè)置 ik sc 手柄
(3) 單擊第 1 個關(guān)節(jié),然后單擊最后一個關(guān)節(jié),可以看到 iksc 手柄了。
(4) 執(zhí)行 rotate 并旋轉(zhuǎn) ik 手柄發(fā)現(xiàn)這似乎只對局部 x 和 y 旋轉(zhuǎn)手柄有效,且釋放手柄后它們又回到一定的角度。
而要按 f 鍵顯示 show manipulator 工具,那么將什么也看不到,因為 iksc 手柄沒有額外的控制器 —— 所有的東西都是由 ik 手柄所控制。 iksc 解算器計算末端受動器的旋轉(zhuǎn)值并以一定的方式旋轉(zhuǎn) ik 鏈,其中一定的方式是指在鏈中的所有關(guān)節(jié)都有默認的局部方向。盡管在手柄中看不到任何有關(guān)關(guān)節(jié)鏈平面的表示,但關(guān)節(jié)鏈平面確實存在于 iksc 解算器中。作為 iksc 手柄,該平面通過關(guān)節(jié)鏈,這樣 x 和 y 軸正位于平面上,如圖 13-21 所示。

圖 13-20 一個 iksc 手柄
對于 iksc 手柄,在 attribute editor 中,如果有兩個或兩個以上鏈相重疊時, iksc 就會有一個 priority 賦值。 priority 1 設(shè)置的手柄將首先旋轉(zhuǎn)鏈中的關(guān)節(jié),然后 priority 2 設(shè)置的手柄將旋轉(zhuǎn)手柄的關(guān)節(jié),依次類推。 po weig
[1] [2] 下一頁
新聞熱點





疑難解答
圖片精選